PID 컨트롤러
피드백 루프는 시스템 동작 제어의 핵심 요소이며 광학 및 포토닉스 , 나노 기술 및 재료 과학 , 양자 기술 , 스캐닝 프로브 현미경 그리고 센서 를 포함한 다양한 영역에서 사용됩니다. 폐쇄 루프 작동을 활용하면 순간 프로세스를 가속화하고 시스템에 대한 방해 영향을 줄이며 정상 상태 동작을 조정할 수 있습니다.
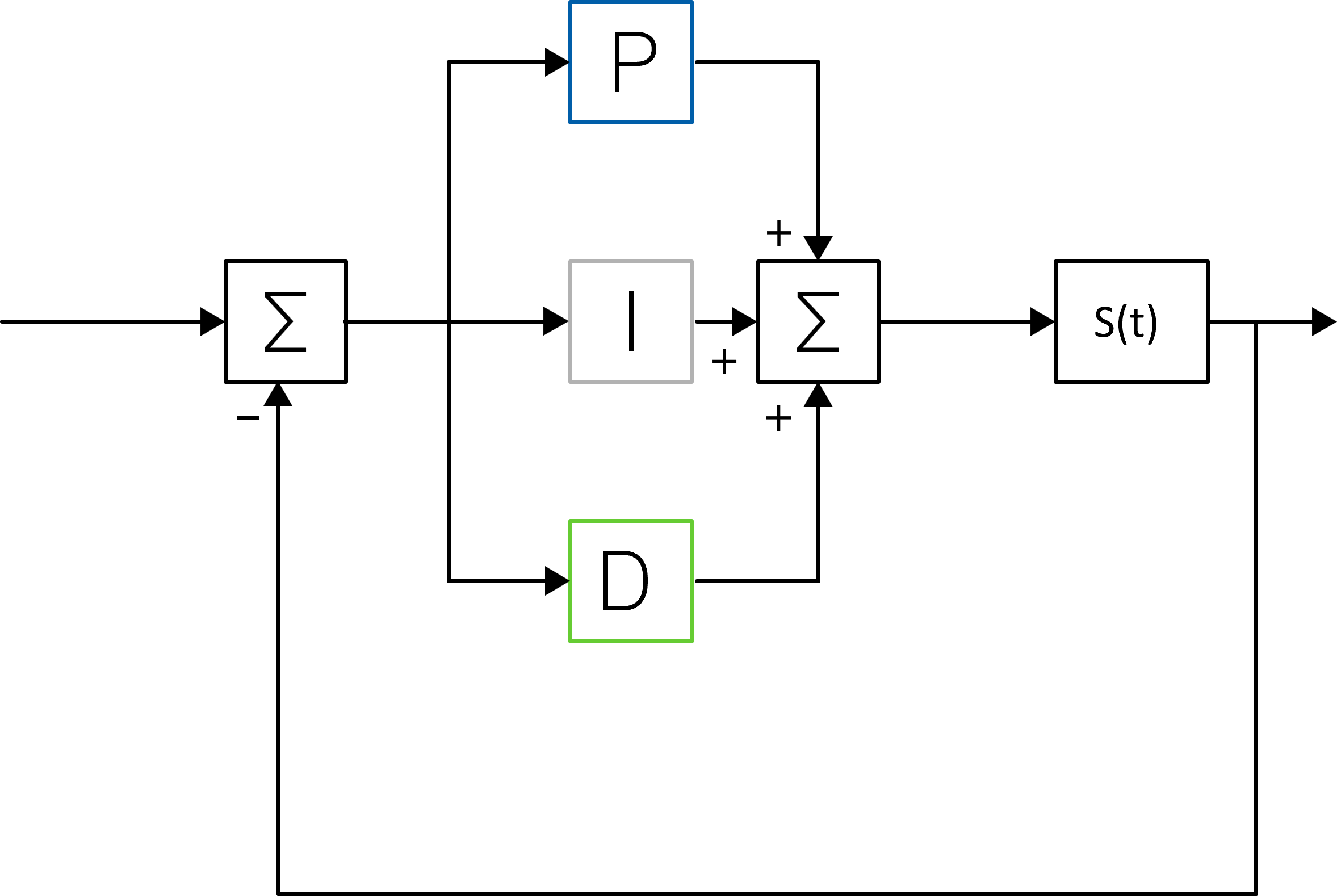
PID 컨트롤러는 먼저 시스템의 출력을 사용자 정의 설정값과 비교하고 오류 신호를 생성합니다. 그런 다음 시스템을 구동하는 출력을 조정하여 이 오류 신호를 최소화하려고 합니다. 이 구동 신호는 오차 신호와 별도로 계산된 3개의 항을 추가하여 얻습니다. 항은 비례(P), 적분(I) 및 미분(D)이라고 하며 각각 고유한 이득이 있습니다.
락인앰플리파이어 PID 컨트롤러
취리히인스트루먼트는 PID 컨트롤러를 고정 증폭기, 임피던스 분석기 및 박스카 평균기를 위한 업그레이드 옵션으로 독점적으로 제공합니다. 결과적으로 PID에 대해 다양한 입력을 선택할 수 있습니다. 선택 세트에는 진폭, 위상, 직교 및 복조 신호의 동위상 구성요소, 박스카 출력, 보조 입력 및 출력이 포함됩니다. 통합 디지털 신호 처리는 최대 신호 대 잡음비, 최소 피드백 루프 대기 시간 및 높은 안정성과 함께 폐쇄 루프 작동을 보장합니다. 아주 작은 신호가 잡음이 많고 스퓨리어스한 환경에 위치하여도 안정적인 입력으로 사용할 수 있습니다. 이러한 피드백 신호는 아날로그 출력으로 사용할 수 있으며 진폭, 주파수, 오프셋 및 위상을 제어하기 위해 내부 주파수 생성기 출력에 직접 적용할 수도 있습니다.
새로운 제어 루프를 설정하고 특성화하는 것은 LabOne® 소프트웨어 를 사용하여 간단히 이룰 수 있습니다. 사용 가능한 파라메트릭 스위퍼, 오실로스코프 및 기타 데이터 수집 도구를 사용하면 사용자가 시간 및 주파수 영역에서 시스템의 특성을 쉽게 이해할 수 있습니다. PID Advisor는 초기 PID 매개변수 세트를 유도하는 데 사용할 수 있는 미리 정의된 여러 모델 기능을 제공하고 이는 나중에 수동으로 조정할 수 있습니다 또한 기록된 단계 응답을 기반으로 PID Advisor에서 제공��한 모델과 비교할 수 있습니다. 혹은 Auto Tune 루틴으로 P, I 및 D를 자동으로 변경하여 잔류 오류를 최소화할 수 있습니다.





기능 설명

추가 기능
MFLI 락인앰플리파이어 및 UHFLI 락인앰플리파이어의 PID 옵션에는 D-게인 저주파 통과 필터와 위상 해제 기능도 장착되어 있습니다.
많은 경우에 D-게인을 도입하면 루프 응답 속도를 높일 수 있습니다. 그러나 이것은 고주파수에 대한 게인이 증가하기 때문에 종종 불안정성을 초래합니다. D-브랜치에 조정 가능한 저주파 통과 필터를 도입하면 불안정에 빠지지 않고 D-게인을 활용하는 데 도움이 됩니다.
락인앰플리파이어에 의해 촉진되는 위상 검출은 일반적으로 arct2(y/x) 함수에 의해 값 범위 ±π로 제한됩니다. 이는 차례로 PID의 '캡처 범위'와 외부 노이즈가 있는 경우 작동 안정성을 제한합니다. 디지털 영역에서 위상 감지가 한계를 초과하는 경우를 감지하고 이에 따라 이 동작을 추적하는 '위상 해제' 기능으로 이 제한을 극복할 수 있습니다. Zurich Instruments의 PID는 최대 ±1024π까지 확장되는 '캡처 범위'를 지원합니다.
사용자 혜택
- PID 입력 및 출력 신호의 광범위한 선택과 완전히 구성 가능한 PID 컨트롤러 는 추가 장비 없이도 광범위한 조건에서 폐쇄 루프 제어를 설계하고 유지할 수 있는 유연성을 제공합니다 . 필요에 따라 컨트롤러 간에 전환하는 것은 문제가 되지 않습니다.
- 여러 PID 컨트롤러가 동일한 기기 내에서 동시에 실행될 수 있으므로 설정 복잡성을 억제하면서 고급 피드백 루프를 활성화할 수 있습니다.
- PID Advisor를 통해 사용자는 설정을 모델링하고 합리적인 시작 매개변수를 계산할 수 있습니다. 그런 다음 자동 튜닝 루틴 덕분에 PID 매개변수를 추가로 최적화하고 잔류 PID 오류를 최소화할 수 있습니다.
- Scope, Spectrum Analyzer, Sweeper 및 Plotter를 포함한 LabOne 도구 세트 �는 통합 분석 및 락인 품질의 모니터링을 용이하게 합니다. 예를 들어 PID 오류를 히스토그램으로 시각화하여 가우스 분포에서 편차를 찾아낼 수 있고, 이를 통하여 설정의 일부가 예상대로 작동하지 않음을 확인할 수 있습니다.